
Over the last few days, I have started designing and ordering the dynamic parts for my project. The list below are the top action items, that I need to complete for the success of my final toy.
- Hydraulic System – The mechanics behind making the spider move are going to be tricky. My idea is to use a manual torque spring to compress a central bag of liquid to cause enough pressure for the legs to raise the body up. I plan on prototyping using a syringe, and plastic tubing to better understand, measure, and test the standing mechanics. If this does mechanism is unfeasible, then I will just use wire legs to support the toy spider up.
- Gear Mechanism – The torque spring will also simultaneously be rotating a gear train, so the spider can gain movement! Thus fulfilling the dynamic aspect of my project. I attached an image and caption to the bottom of this blog that explains how the device will function.
- TIME – As our Professor and other students have stated, time is a big factor here. I need to order my parts asap, so I can have my resources readily available. It will also take a few full days of working to prototype, test, and fabricate the hydraulic system and gear mechanism. I have started making a schedule for all the big projects, that I need to get done in this class and other courses. Plus, I want to make something that I am proud of!
- SHELL – This will be the aesthetic of my project, since the walking mechanism will be hidden and protected under either a 3D printed shell, or a silicon cast. Both have unique material properties and qualities that I need to take into further consideration.
- Aesthetics – They are a constraint, since I want to experiment with different styles. I have narrowed my spiders final form to one of two aesthetics on opposite spectrum: First idea was something extremely cute and cuddly; so very abstract, super colorful, maybe cartoon-y, and baby face features. Second idea was something super creepy and scary, like far in the uncanny valley. I wanted to build a 4-8 legged toy that is scary and gross like a zombie, or super cute like a teddy bear.
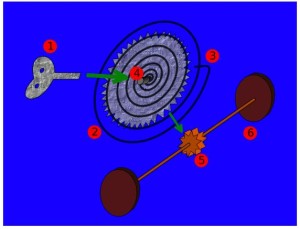
The image above describes the tinker toy mechanical system operates. A removable or non-removable key (1) is inserted into the torque spring (2). The torque spring is fixed to the body of the machine (3), which allows for the necessary tension to make a mother spur gear (4) rotate a set of gears. These gears (5) are attached, as shown in this image, to an axle which revolves the wheels (6) making the entire device move forward!
2 Comments. Leave new
Interesting to see the schematic of components. It looks like you’ve given the mechanical system some good thought and your approach to its constraints are sound. I believe that iterations in the prototyping phase will direct some of these decisions and eventually your aesthetic. Looking forward to seeing the final piece… let me know if you want any further design input for the 3D shell!
Tyler, how big is this spider going to be when it is finished? I’m also curious if increasing the number of legs (you stated 4-8 above) will further complicate the project. I’m not familiar with the mechanics of what you are making so just asking the question. Personally, I like the juxtaposition of something like a spider, which is ordinarily considered creepy or scary, made to appear cute and cuddly. Good luck.