For my aesthetic, I have had considerable trouble trying to figure it out and decide on my project. However, I have always been interested in two major themes: organic architecture and engineering. I have always been interested in these 2 topics and a while ago I discovered kinetic sculptures. One of my favorite artists is Theo Jansen, a Dutch artist famous for making Strandbeest. “Theo Jansen is engaged in creating new forms of life: the so-called strandbeests. Skeletons made from yellow plastic tube (Dutch electricity pipe) are able to walk and get their energy from the wind” [1]. His multiple creations throughout the years inspired me to make my own strandbeest as my project.
5 specifications: (** Top Priority, *Mid Priority, nothing: low priority)
- ** The ability to move, not concerned if its ability to move on it’s own, but at least have the ability to move on its own under a slight force
- *Make it look lifelike, the theme of Theo Jansen is evolution and imitating life with his beasts
- Make it similar in color, strandbeest are made of PVC tubes or wood, will be making this out of plastic so won’t have the most similar look
- *Make it all from one material, Want to print it all out of one material, don’t want to add additional hardware like screws or bearings
- Add additional features than just legs, Theo Jansen has added sails and a pneumatic system to his most recent iterations
These were the specifications I created early in the design process. As can be seen, I was focused on making the strandbeest able to walk and create it out of a single material. Unfortunately the more I work on this the harder it was for me to try making it more lifelike so I dropped the priority of that specification. I wanted to create a strandbeest that was similar to Theo Jansen’s but with my own twist and something I could display on my self. You can’t really display his on a shelf.
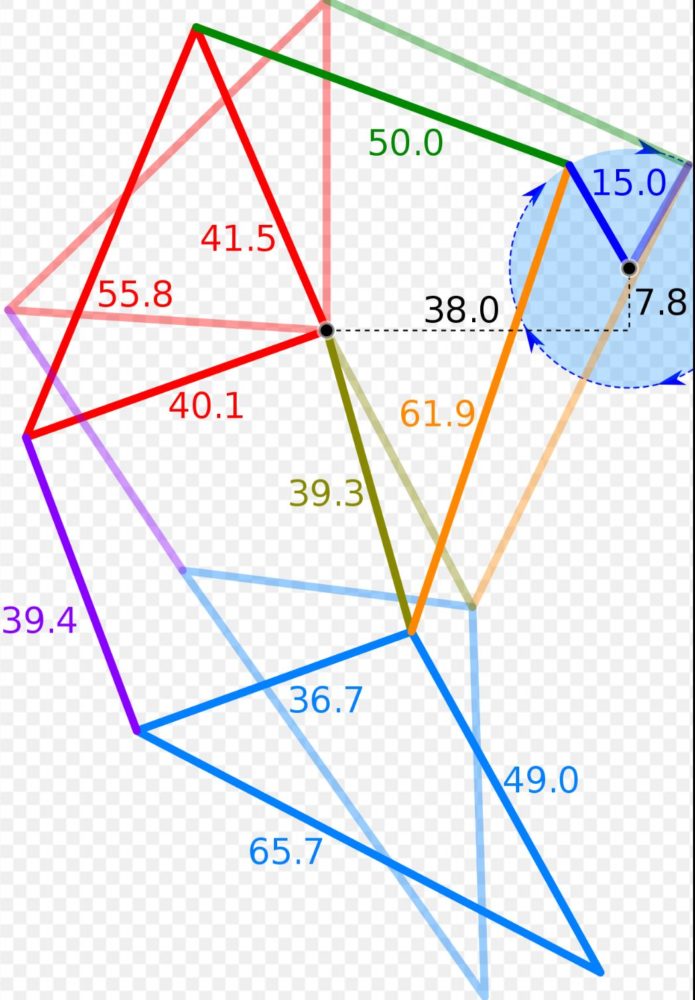
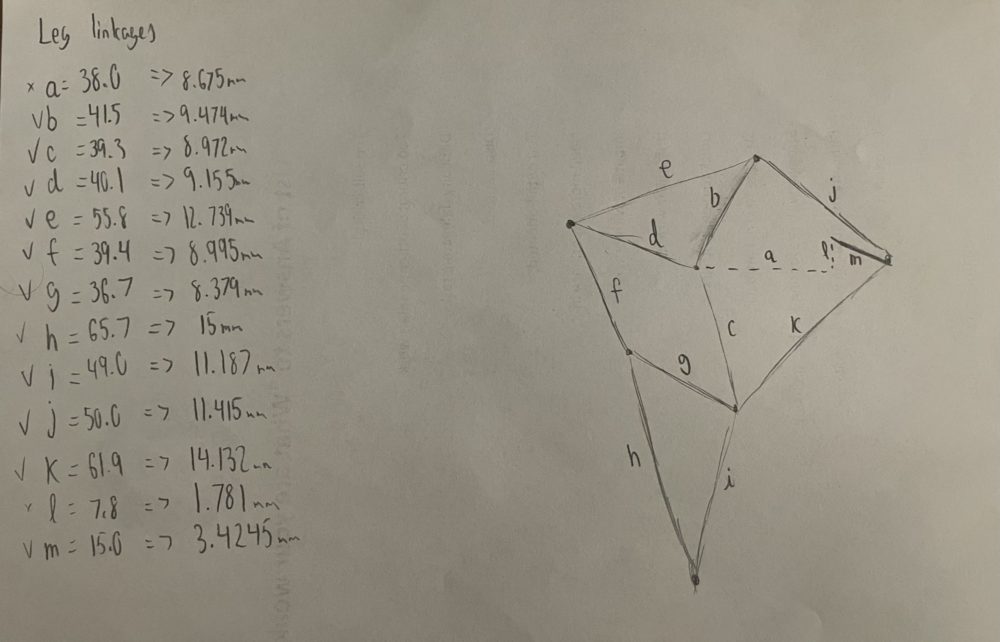
My Initial sketch was actually taking the image below that I acquired from Wikipedia but is based off Theo Jansen’s leg segment measurements. From this I created my own sketch seen in figure 2 and determined the leg segment lengths and how big I wished to build it.
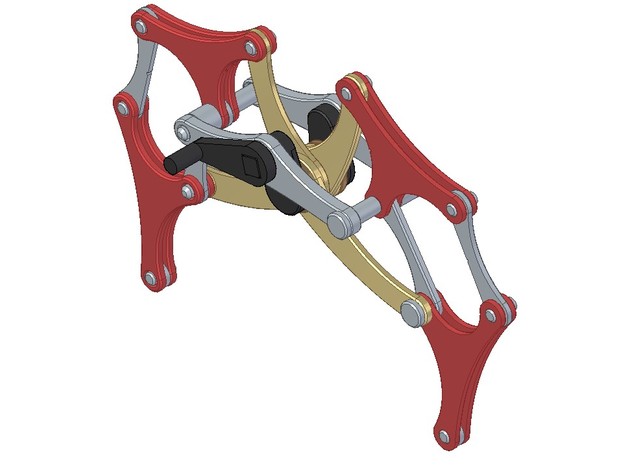
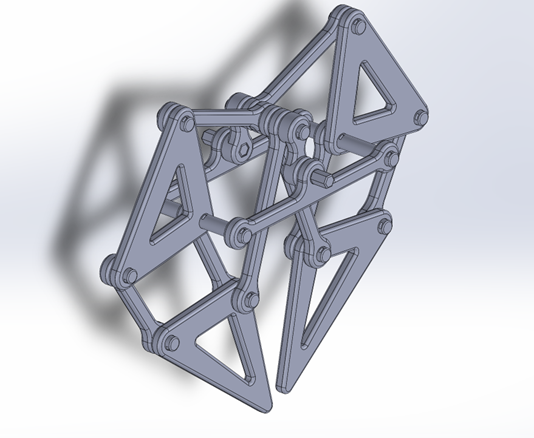
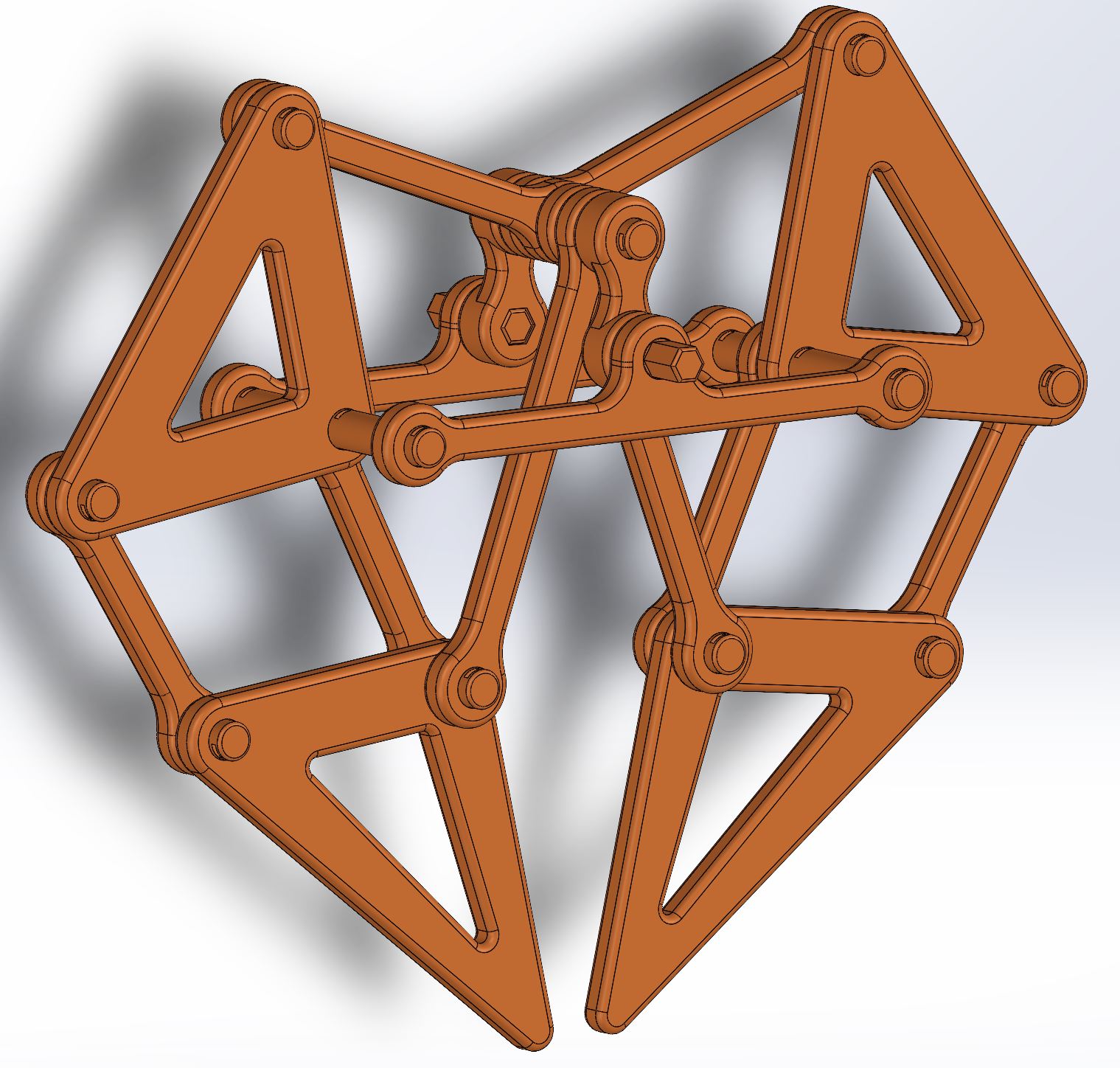
After I made my initial measurements I moved on to making it functional. At this time I did not focus on the aesthetic at all but focused on the movement. For this I took inspiration from Thingaverse (figure 3), a website for public 3D models available for printing, and created my own rendition (figure 4). As I worked on this I ended up switching my aesthetic which was originally going for more lifelike to minimalistic and industrial. I wanted to move away from the lifelike and move it to more robotic. I believe you are able to see it in figure 4 this aesthetic coming across.