
I’ll be exploring the inspirations, vision, and design process behind my attempt to build a dynamic robot.
Inspiration:
I am fond of Sci-Fi literature as I believe this is most important form of literature which impact and guides the future of our world. It talks about how the world intend to be, how computers may forge the world of tomorrow among many other prescient events.
My main inspiration for trying to build a sci fi robot aesthetic stems from –
- Simon Stålenhag’s Tales from the Loop, which is a wildly successful crowd-funded project that takes viewers on a surprising sci-fi journey through various country and city landscapes―from small towns in Sweden and the deserts of Nevada to the bitter chill of Siberia―where children explore and engage with abandoned robots, vehicles, and machinery large and small, while dinosaurs and other creatures wander our roads and fields.
- Followed by the hard Sci Fi book by Andy Weir named as “Project Hail Mary”
My Vision:
What I intended to do was very simple here, I wanted to build an artifact whose aesthetics were rooted from SciFi stories which I had read in past, also it must look like a robot. For Functionality, I did ask myself for a lot though to start with for version 1 build I am trying to achieve whatever is possible given component lead time constraints. At bare minimum, I wanted keep at least one dynamic part in functionality with major focus on aesthetics of the robot.
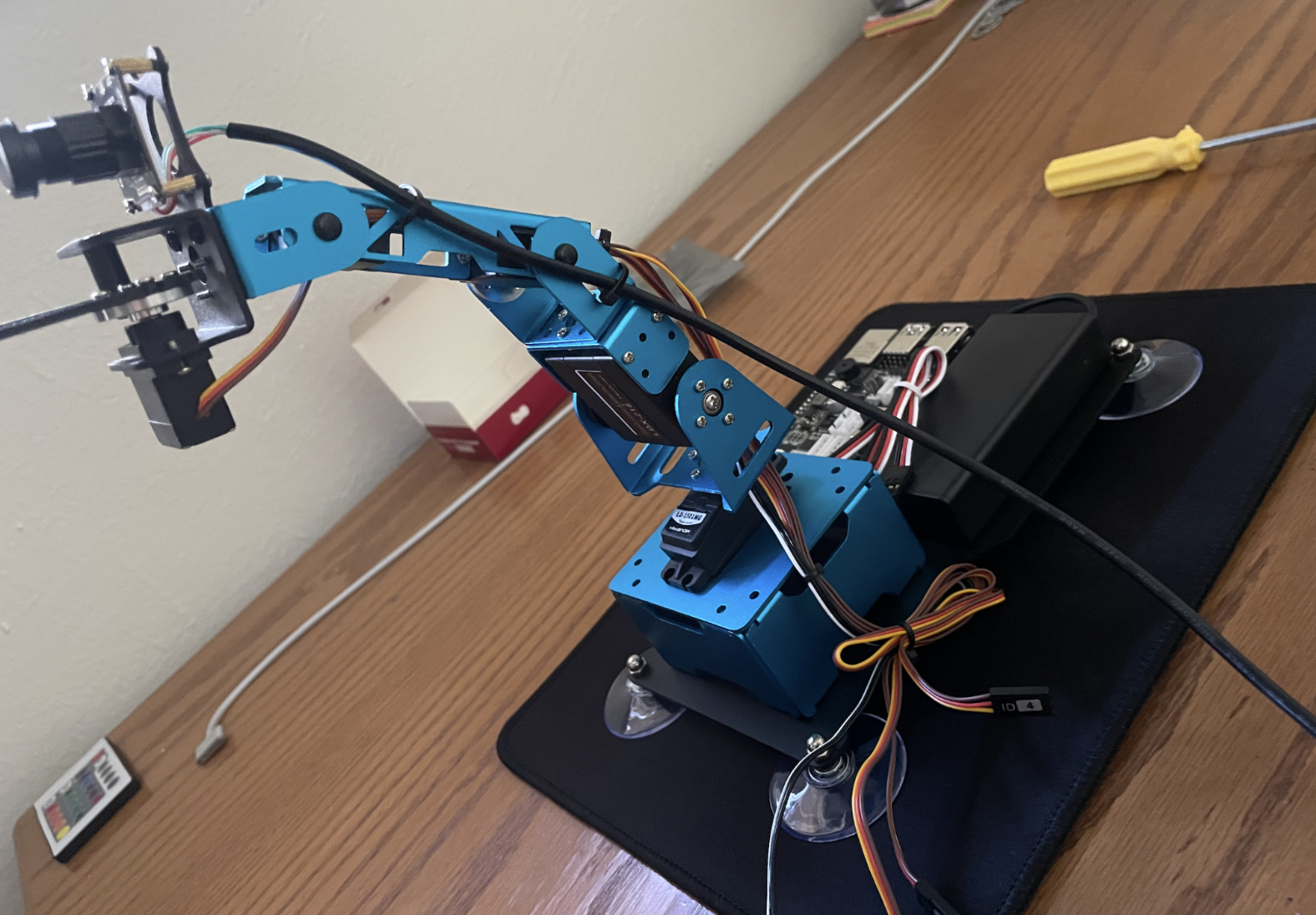
So, cometh the final times of project I have decided to settle on a 5DOF robotic arm based on time, resources availability. Don’t worry for original vision will be realized too but not just at the first iteration but in the ones that follows the current project. This robotic arm shall have a vision feedback to interact with its surrounding is also one important criteria I wanted to make this project a pathfinder mission for future iteration learning lessons.
Design Process:
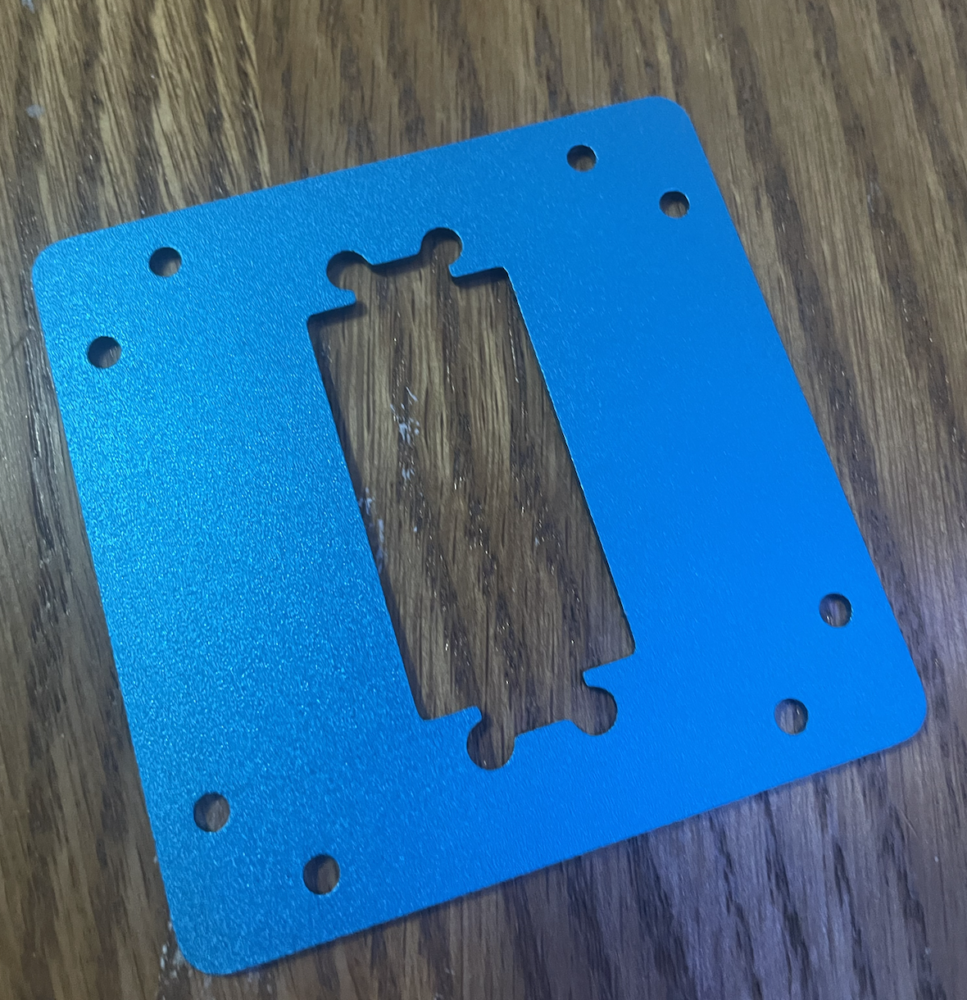
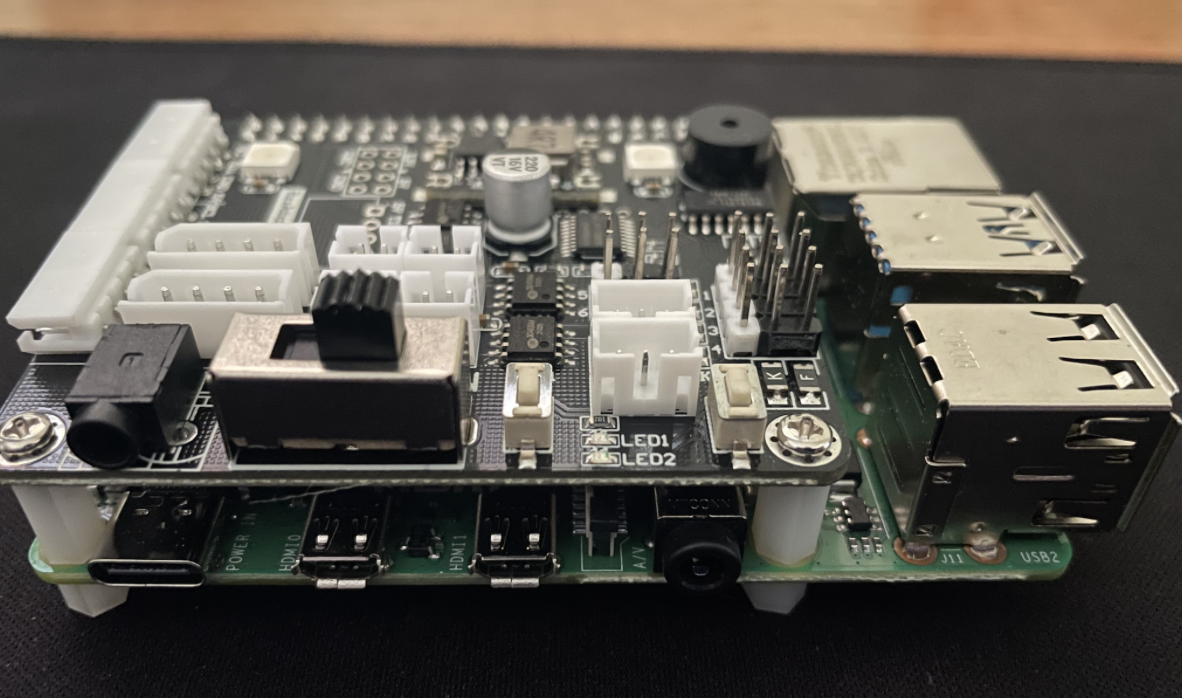
I was planning to additively manufacture the arms of robot, although due to time constraints and certain rigidity concerns while navigating I pivoted to build them as custom painted finished aluminum sheet to enhance aesthetics of the components. After the CAD was developed, these components were online ordered for custom build to save time, I am fabricating on my own as well but that will be completed after this semester. So, I’ll be ordering custom fab parts based on my design to save resources. All the nut, bolts, micro-controller interfaces, cables has been procured and when put together starting to look like a robotic arm.
 Still work to do:
Still work to do:
With the robotic arm, taking its final shape form physically. I still need to do a lot of work with respect to fine tuning the stepper motor codes along with computer vision feedback check.